Body
Beginner Designer
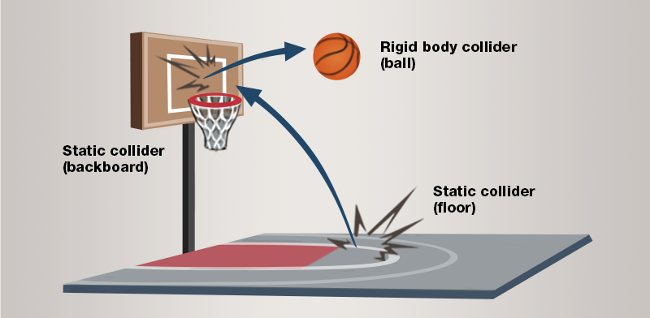
Body move based on physical forces applied to them, such as gravity and collisions. Typical (rigid)bodies are boxes, balls, furniture, and so on — objects that can be pushed, pulled, and knocked around, and also have effects on other bodies they collide with.
Add a Body Component to an entity
In the Scene Editor, select the entity you want to add the component to.
In the Property Grid, click
Add component, hoverPhysics - Bepuand selectBodyComponent.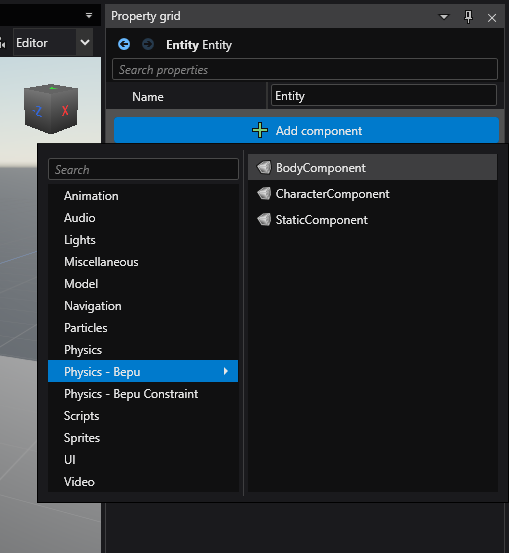
Note
You will need to set a collider for this newly created body, you can do so through the Collider property, see collider shapes.
Warning
Never use mesh colliders for bodies, use them only for statics, they are far too slow to be used as bodies. If you absolutely need a more complex shape than the primitive ones, use a convex hull instead, see collider shapes.
Have a look at the API for more detail on the properties of this component.